Published on:2026-05-24 Click:61
Flexible underwater robot cable, multi-core PUR jacket. High-flex design for ROV, AUV, and underwater robot control systems requiring continuous bending capability.
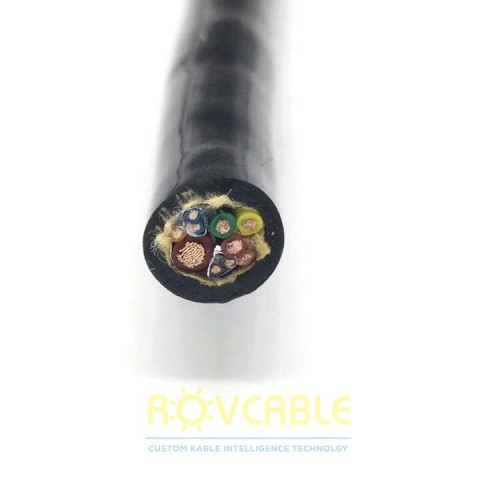
The flexible underwater robot cable is a general-purpose high-flexibility cable for ROV, AUV, and underwater robot tether and internal wiring applications. Fine-stranded Class 6 tinned copper conductors in a high-flex PUR jacket provide excellent resistance to bending fatigue in sheave, drum, and moving-joint applications. Available in core counts from 4 to 24 and conductor cross-sections from 0.14mm² to 6mm².
| Parameter | Specification |
|---|---|
| Conductor Class | IEC 60228 Class 6 extra fine-stranded |
| Conductor Material | Tinned copper |
| Core Count | 4 -- 24 (per spec) |
| Conductor CSA | 0.14 mm² -- 6 mm² (per spec) |
| Outer Jacket | Polyurethane (PUR) high-flex compound |
| Min Bend Radius | 7.5 x OD (dynamic) |
| Colour | Black |
| Custom | Core count, CSA, OD, shielding, Kevlar |
Request datasheet, custom length, or OEM pricing: sales@rovcable.com -- Shanghai Kabel Intelligence Technology Co., Ltd.
IEC 60228 Class 6 defines extra-fine-stranded conductors. A Class 6 conductor has a much larger number of very thin strands compared to Class 5 (fine-stranded) or Class 1/2 (solid/stranded). More strands = greater flexibility and higher resistance to bending fatigue, as the bending stress is distributed across more strands.
Cross-section is determined by current requirement and voltage drop. Use the formula: CSA (mm²) = (current x cable length) / (56 x allowable voltage drop in V). For a robot arm actuator drawing 2A over 5 m with 0.5V drop: CSA = (2 x 5) / (56 x 0.5) = 0.36 mm² -- select 0.5 mm² as the next standard size up.